返回目录:word文档
各位朋友大家好,这篇接着“「从零开始学VR」第3节 虚拟现实系统组成和关键技术”讲起。
在正式进入主题前,我想跟大家一起回顾下之前内容。
通过前面三节讲解,相信大家已经对我写这个栏目缘由,以及虚拟现实技术本身有一个全局性概览,本栏目将按照总分结构,层层递进来解析技术。
需要强调一点,我们不要被各种稀奇古怪词语给蒙住,觉得虚拟现实高大上、玄乎。其实扒开各种修饰词语,从本质上认知虚拟现实,你会发现它只是一个工具而已,和我们使用Word、Photoshop、PPT没有区别,都是为了解决某类具体问题。
所以,接下来大家放松心情去看就可以,哪怕有些地方不太懂也没关系,毕竟这个栏目初衷只是基础技术扫盲。
从第四节开始,我会从组成虚拟现实各个子系统和关键技术等更细节的层面,为大家进一步揭开VR神秘面纱。
本文3198个字,阅读约需5分钟。
在这一节主要解决以下几个问题:
通过这一节讲解,我们将认识虚拟现实输入系统之一的位置追踪器,了解其工作原理和主要参数指标。
01初识虚拟现实场景

(典型VR应用场景)
上图是一套警务虚拟现实实训系统图,左边训练者担任警察角色,他当前通过头盔看到的画面和场景就是上图的劫匪及校园。
这套虚拟系统通过模拟现实世界各种突发事件和重大警情,反复训练一线警察面对各种事件的应对流程和临场处置能力,从而提高现实世界案件处理效率,降低处理失误造成的重大生命财产损失。
我们会看到,训练者戴着一套头戴式显示器(head mounted display,HMD,简称头盔),头盔把训练者从现实世界中隔离开,他眼睛看到所有东西都是电脑实时渲染的三维画面。
当训练者头部向各个方向移动(前、后、左、右、上、下)和旋转(滚动、俯仰、偏转)时,他的视野场景以相应速率刷新,眼睛看到的画面随着头部运动而实时调整,从而允许训练者像在现实世界中一样,在虚拟世界中环顾四周,这就是所谓的临场沉浸感(具体见视频)。
(视频来源网络,如有侵权请联系删除)
是不是挺有意思的,你是否知道具体技术实现手段呢?
别着急,我们这次要聊的主题就是关于三维位置跟踪定位技术以及原理介绍。
02什么是位置跟踪及位置跟踪设备
VR是在三维空间中与人交互的技术,为了能及时准确获取人的动作信息,检测有关物体的位置和方向,并将信息反馈给VR系统,就需要使用各类高精度、高可靠性的跟踪定位设备,这种实时跟踪以及交互装置主要依赖跟踪定位技术,它是VR系统实现人机之间沟通的主要通信手段,是实时处理的关键技术。
位置跟踪设备是实现VR系统中用于测量定位对象位置和方向实时变化的专门硬件设备,通过跟踪设备捕捉VR体验者的位置和方向反馈给VR系统,从而模拟真实的自然交互动作,使系统操作简单、灵活、随意。
跟踪设备通常需要和其他VR设备配合使用,像上小节的头盔是其中一种。
细心的读者可能会发现,上小节警务实训系统的图片还少了一些功能部件,头显外部区域其实还有一套定位跟踪系统。
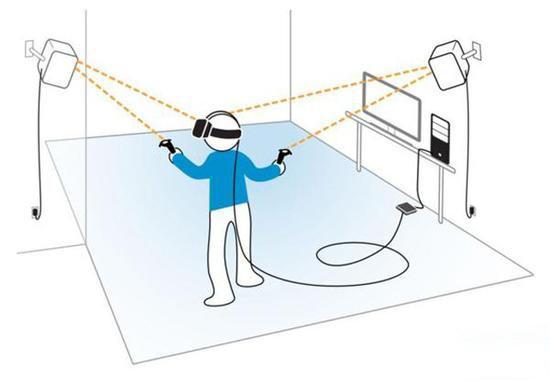
(定位原理,图片来源网络,如有侵权请联系删除)
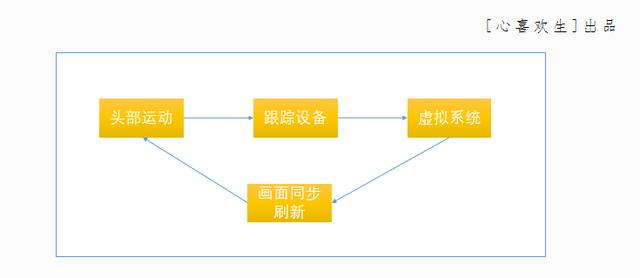
由于头盔上面有大量可被跟踪设备检测的信息点,当头盔随着头部运动时,跟踪设备通过扫描获取信息点位置和移动情况并实时计算三维坐标及角度,然后把计算的数据实时传输到图形工作站和虚拟现实系统,工作站输出指令,让三维画面实时渲染并根据头部运动动态的呈现给训练者。
具体逻辑如下:
03让我们先认识三维的概念

维度简单来说就是指独立的时空坐标数目。
我们说零维度空间是一个点,无限小的点,不占任何空间,点就是零维空间;当无数点集合排列之后,就形成了线,直线就是一维空间;无数线构成了一个平面,平面就是二维空间;无数的平面并列构成了三维空间,也就是立体的空间。
三维是指在平面二维系中又加入了一个方向向量构成的空间,所谓三维就是人为规定的互相垂直的三个方向,用这个三维坐标,可以把整个世界任意一点的位置确定下来。
三维即坐标轴的三个轴,即x轴、y轴、z轴,其中x轴表示左右空间,y轴表示上下空间,z轴表示前后空间,这样就形成了人的视觉立体感,三维动画就是由三维制作软件制作的立体动画。
虚拟现实是三维动画技术的延伸和拓展,它们的不同是有无互动性。除此之外,虚拟现实需要确定物体在三维空间的位置和方向,一般需要跟踪6个不同的运动方向,即六自由度,而三维是三自由度。
04 进一步认识六自由度
在理论力学中,物体的自由度是确定物体的位置所需要的独立坐标数,当物体受到某些限制时,自由度减少。
如果将质点限制在一条直线上运动,它的位置可以用一个参数表示,所以质点的运动只有一个自由度;如果将质点限制在一个平面上运动,位置由两个独立坐标来确定,它就有两个自由度;假如将质点限制在空间运动,位置由3个独立坐标来确定,它就有三个自由度。
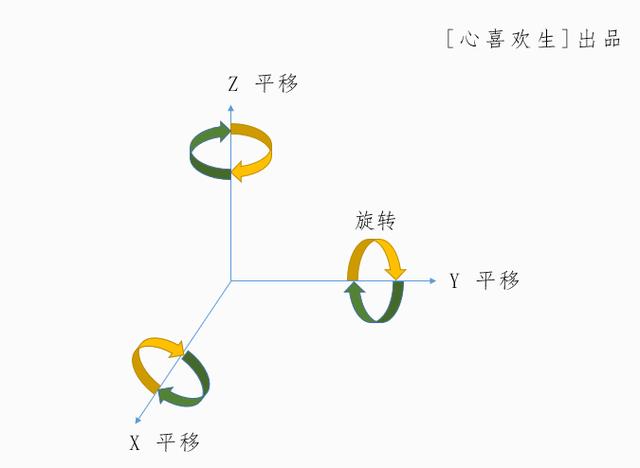
物体在三维空间运动时,如果想实现接近现实不受限制的运作体验,就必须具有6个方向即六自由度的自由: X/Y/Z坐标轴的3个独立平移运动,以及围绕X/Y/Z坐标轴的3个独立旋转运动,这6个运动都是相互正交的,并且对应6个独立变量,即3个平移自由度(即X、Y、Z)和3个旋转自由度(俯仰角、横滚角及航向角),这就是我们常听说的虚拟现实六自由度的概念由来。
注意:当物体在空间高速运动时,对位置跟踪设备要求是必须足够快速测量、采集和传送数据,无论跟踪设备采用何种技术,都不应该限制或妨碍物体的自由运动,如果物体运动受到某些条件限制,自由度会响应减少。
05 位置跟踪器主要性能指标
在VR系统中,对体验者的实时跟踪和接收动作指令的交互技术主要依赖各种位置跟踪设备,它是人机之间互动的重要通信手段,是实时处理的关键技术,位置跟踪设备通常包含精以下几个方面的参数指标:

1)精度和分辨率
精度和分辨率决定一种跟踪技术反馈其跟踪目标位置的能力。
精度是指对象真实的三维位置与跟踪设备测量出的三维位置之间的偏差(误差范围),目标位置越接近测量值则精度越高。跟踪用户实际动作的效果越好,跟踪设备越精确,则这个差值就越小。对于平移和旋转运动,需要分别给出跟踪精度(单位分别为毫米和度),精度是变化的,会随着离坐标系原点的距离的增加而降低。
分辨率是指跟踪设备能够检测出的被跟踪对象的最小三维位置变化,小于这个距离和角度的变化将不能被系统检测到。
2)响应时间
响应时间是一种跟踪技术对时间的要求,包含采样率、数据率、更新率、延迟四个参数。
采样率指传感器测量目标位置的评率;数据率指每秒所计算出的位置个数;更新率指跟踪系统向主机报告位置数据的时间间隔;延迟表示从一个动作发生到主机接收到反应这一动作的跟踪数据位置的时间间隔。
特别说明下,用户感受的延迟,包括跟踪设备测量对象位置变化的延迟、跟踪设备与计算机之间通信时间延迟和计算机渲染和显示虚拟场景所需时间延迟。
延迟较大会带来较长时间滞后,例如虚拟头盔运动与用户所看到虚拟场景运动之间存在较大时间滞后,明显画面迟滞,会导致VR系统参与者出现恶心、疲劳和头痛等症状。

3)鲁棒性
鲁棒性指系统在相对恶劣的环境下避免出错的能力。
由于跟踪系统通常处在一个相对嘈杂和各种外部干扰的环境下,比如部分物体遮挡住目标物体,光照或其他因素导致目标物体定位发生畸变,等等诸多干扰因素无法根除,这就要求VT跟踪系统必须具备一定抗干扰能力和强大的定位识别稳定性。
4)其他指标
跟踪系统还有一些指标也值得重视,比如重量、大小、安全性等,轻而小巧的跟踪设备对于VR系统操作则而言,更加舒适和无感,而安全性则是关乎操作者身心健康的影响因素,是必须要严格把控的指标。
位置跟踪是VR系统的基本技术之一,没有跟踪技术根本不会有所谓的沉浸感,所以我把这部分作为技术的第一各关键节点拎出来讲,后面会进一步讲解位置跟踪及空间定位技术,争取将其讲透,让大家都能理解。